Imaging
GoPro – HD video
Canon G9 camera – High resolution 12 megapixel RAW photos – pointed out towards the horizon running a custom CHDK firmware and lua intervalometer script set to take a RAW photo every 10 seconds.
See photos and video here…
Sensors and data collection.
The Arduino is a small electronic micro controller platform which is powerful, easy to program and runs happily on battery power. Version 1.0 contained sensors for temperature inside the payload capsule and outside. Future versions will include sensors to record barometric pressure, humidity, light spectrum, accelerometer data etc.
See cool graphical data here…
Tracking system
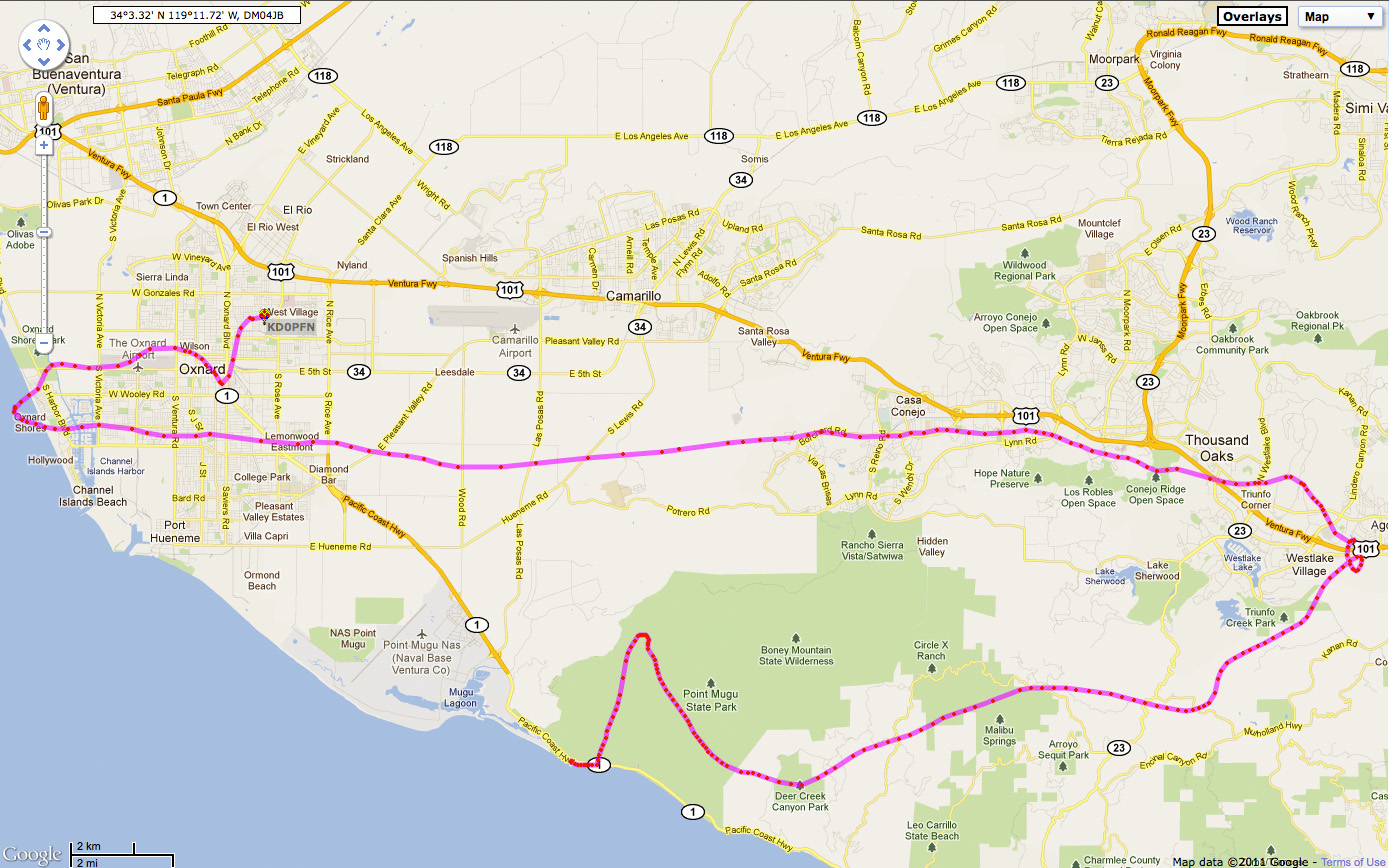
APRS is the amazing ham radio based network system used for real-time tracking of broadcasting beacons. A tiny onboard Micro-Trak radio will broadcast the GPS location every 30 seconds during flight which we will be able to track in real time to follow and recover the payload.
In addition to the raw GPS data, we used aprs.fi for real time visual tracking during the flight.
See the flightpath map here… (we launched from Pt Mugu Rock)
{kind=link}
Balloon
Kaymont sounding balloon – KCI 1000.
Parachute
A Kaymont No. 5012 parachute will bring the payload safely back down to earth. Theoretically 😉
